Binoculaire dispariteit

Zie voor meer informatie: Waarom staat mijn artikel op de beoordelingslijst. Voel je vrij het artikel te bewerken.
Haal de pagina echter niet leeg en verwijder deze boodschap niet voordat de discussie gesloten is.
Binoculaire dispariteit is het verschil in de beelden zoals waargenomen door het linker- en rechteroog. Het verschil kan een of meer van de volgende componenten hebben:
- horizontale dispariteit, horizontale verschillen veroorzaakt door de horizontale afstand van 6,5 cm tussen de twee ogen;
- verticale dispariteit: hoogteverschillen veroorzaakt door de stand van de ogen en/of het kantelen van het hoofd; en
- cyclodispariteit: ongelijke rotaties van de twee ogen rond hun visuele assen.
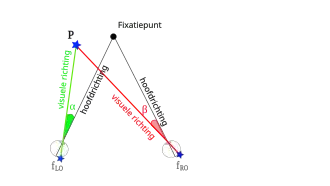
Horizontale dispariteit wordt over het algemeen uitgedrukt als het verschil in de visuele richtingen zoals waargenomen door het linker- en rechteroog. In de afbeelding: het verschil tussen de hoeken α en β. Bij stereozien (stereoscopie) wordt horizontale dispariteit ook uitgedrukt in het aantal pixels dat het beeld in het rechterbeeld is verschoven t.o.v. het linker beeld. Horizontale dispariteit wordt ook wel binoculaire parallax genoemd.
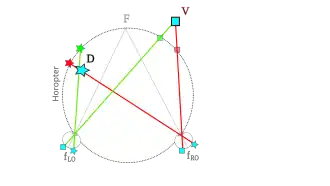
De horopter is gebruikt om de relatie tussen dispariteit en stereopsis, en tussen dispariteit en dubbelbeelden te beschrijven. De horopter is de verzameling punten met een dispariteit van nul ten opzichte van het fixatiepunt (α = β).
Horizontale dispariteit, maar in sommige gevallen ook verticale dispariteit[1], kan bijdragen aan stereopsis, maar alleen als horizontale, verticale en cyclo-dispariteiten beperkt in omvang zijn.
Horizontale dispariteit wordt ook geassocieerd met de waargenomen afstand tussen dubbelbeelden. Nul-dispariteit en kleine dispariteiten worden geassocieerd met het zien van gefuseerde beelden bij richtingzien.
Binoculaire dispariteit en bewegingsparallax zijn vergelijkbare geometrische begrippen die een vergelijkbare sensatie van stereopsis geven. Als voorbeeld toont de afbeelding afwisselend het beeld van het linker en rechter oog, waardoor er een 3D-sentatie ontstaat in het systeem voor bewegingswaarneming.
-
 Binoculaire dispariteit waargenomen als bewegingsparrallax.
Binoculaire dispariteit waargenomen als bewegingsparrallax.
Toepassing
Wheatstone vond de stereoscoop uit in 1838 en bewees dat horizontale dispariteit voldoende is om stereopsis te ervaren. Sindsdien zijn er vele toepassingen gerealiseerd, variërend van instrumenten zoals de binoculaire microscoop tot hulpmiddelen voor stereozien (stereoscopie).
In de geneeskunde wordt dispariteit gebruikt om aandoeningen in het binoculair zien op te sporen en te corrigeren.
Kennis van dispariteit kan worden gebruikt om informatie uit stereobeelden te halen. Met behulp van geometrie en algebra kunnen de dispariteiten die in de 2D-stereobeelden aanwezig zijn, worden geïnterpreteerd als coördinaten in de 3D-ruimte. Dit kan worden gebruikt bij robotnavigatie. De Mars Exploration Rover gebruikt dit om het terrein te scannen op obstakels.[2] Hij heeft hiervoor stereoscocamera's en voert dispariteitberekeningen uit op de geschoten stereobeelden, om objecten zoals rotsblokken te detecteren en te ontwijken.[3]
Diepteinformatie gebaseerd op dispariteit is niet altijd eenduidig (correspondentieprobleem). Bij de mens leidt dit tot de tweespijkerillusie.
Zie ook
- Binoculair zien
- Richtingzien
- Stereopsis (zien)
- Stereopsis (zien)#Binoculaire dispariteit
- Tweespijkerillusie
Referenties
- ↑ Matthews N; Meng X.; Xu P; Qian Q. (2003) “Een fysiologische theorie van dieptewaarneming vanuit verticale dispariteit”, Vision Research. Volume 43, Nummer 1, januari 2003, Pagina's 85-99.
- ↑ "The Computer Vision Laboratory." JPL.NASA.GOV. JPL/NASA, z.d. Web. 5 juni 2011. <[1]>.
- ↑ "Spacecraft: Surface Operations: Rover." JPL.NASA.GOV. JPL/NASA, z.d. Web. 5 juni 2011. [2].