Rotaties in de driedimensionale ruimte worden onderscheiden in actieve rotaties en passieve rotaties. Een object dat een actieve rotatie ondergaat, wordt daadwerkelijk gedraaid en neemt een nieuwe positie in de ruimte in. Een actieve rotatie wordt daarom ook alibitransformatie genoemd, van alibi, het Latijnse woord voor elders. Ondergaat een object daarentegen een passieve rotatie, dan blijft het object zelf op z'n plaats in de ruimte, maar wordt zijn positie bepaald ten opzichte van een nieuw assenstelsel dat door de tegengestelde rotatie uit het oude assenstelsel is ontstaan. Een passieve rotatie heet daarom ook aliastransformatie, Latijn: álias víces, ook genoemd.
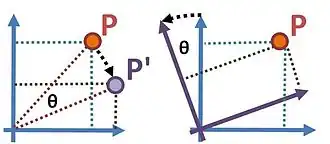
In de linkerfiguur wordt het punt actief met de wijzers van de klok mee gedraaid over een hoek naar het punt . Het punt heeft nieuwe coördinaten.
In de rechterfiguur blijft het punt op z'n plaats, maar ondergaat een passieve rotatie doordat het assenstelsel tegen de wijzers van de klok in wordt gedraaid over een hoek . Als gevolg hiervan krijgt ten opzichte van dit gedraaide assenstelsel ook nieuwe coördinaten.
Door in dit voorbeeld de passieve rotatie tegengesteld aan de actieve te kiezen zijn de nieuwe coördinaten in beide gevallen dezelfde.
De rotatie wordt bepaald door de beelden van de eenheidsvectoren in het -stelsel:
Een vector wordt door de rotatie actief afgebeeld op de vector
,
waarin de bij behorende matrix is.
De coördinaten van het beeld kunnen worden berekend als:
,
dus als het matrixproduct van de matrix van de rotatie met de vector .
Passieve rotatie
Bij een passieve rotatie wordt een tweede rechtshandig assenstelsel, het -stelsel, gevormd uit het stelsel door de actieve rotatie in tegengestelde richting. De eenheidsvectoren in dit -stelsel zijn de geroteerde eenheidsvectoren van het -stelsel:
De vector in het -stelsel heeft in het -stelsel de coördinaten :
Dus is
of anders geschreven in matrixvorm
De nieuwe coördinaten zijn dus het matrixproduct van de matrix van de rotatie met de vector . Men zegt dat de vector een passieve rotatie heeft ondergaan.
Samenvatting
Bij een actieve rotatie worden de objecten gedraaid. Het beeld van een vector is de vector . Bij een passieve rotatie wordt het assenstelsel in tegengestelde richting gedraaid met de rotatie . Nu stelt de coördinaten van een vector ten opzichte van het gedraaide assenstelsel voor.
Noemt men het beeld van het punt de nieuwe , dan kan men zeggen dat bij een actieve rotatie men de coördinaten van de nieuwe in het oude stelsel berekent en bij een passieve rotatie de coördinaten van de oude in het nieuwe stelsel.
Verband
Het matrixproduct van de matrix van de rotatie met de vector kan als een actieve rotatie worden opgevat en dan stelt dit product de geroteerde vector voor, of als een passieve rotatie en dan stelt dit product de coördinaten van voor ten opzichte van het in tegengestelde richting geroteerde assenstelsel.
Kiest men bij een passieve rotatie de rotatie van het assenstelsel tegengesteld aan de rotatie bij een actieve rotatie , dan zijn de nieuwe coördinaten bij de actieve rotatie gelijk aan de nieuwe coördinaten bij de passieve rotatie. Dan is namelijk
dus
Let op het verschil tussen , de oude coördinaten van de nieuwe en , de nieuwe coördinaten van de oude .
Voorbeeld
De onderstaande matrix beschrijft een rotatie om de as over een hoek van 90°.
De vector wordt actief gedraaid naar de vector .
Bij een passieve rotatie met de draaiing wordt het assenstelsel gedraaid met de tegengestelde rotatie :
en worden de nieuwe eenheidsvectoren gegeven door de kolommen van deze matrix.
De coördinaten van ten opzichte van dit nieuwe stelsel worden gegeven door:
,
wat dezelfde getallen zijn als de coördinaten van bij de actieve rotatie, maar met een andere betekenis. Bij de actieve rotatie betekent , dat
,
terwijl bij de passieve rotatie de coördinaten de betekenis hebben:
Toepassing
Vooral in de robotica wordt de beweging van een object vaak aan de hand van een assenstelsel beschreven, dat met het object verbonden is, een lichaamseigen stelsel. Een verplaatsing van het object betekent dan, afgezien van een translatie, een passieve rotatie. Het assenstelsel waarin het object beweegt, bijvoorbeeld een aardgebonden assenstelsel, ondergaat dan een rotatie met betrekking tot het lichaamseigen stelsel. Bij meer objecten kunnen al die verschillende lichaamseigen stelsels snel onoverzichtelijk worden. Het zal dan eenvoudiger zijn één vast aardgebonden stelsel te kiezen en de beweging van de objecten, weer afgezien van translaties, als actieve rotaties te beschrijven.
Literatuur
Dirk Struik. Lectures on Analytic and Projective Geometry, 1953. blz 84, Addison-Wesley.
Websites
Rigid Bodies, 22 oktober 2012. voor de Utah State University











}](./95cff638410609cefdc641a06330711eeaecfcbb.svg)
![{\displaystyle [\mathbf {R} _{a}]}](./91f0dae02cd5eb595c901ae10f9e7159c2baeaa1.svg)
}](./08d439641e073dafaf36ce3f10f835a9131f67e3.svg)











=(v_{X},v_{Y},v_{Z})}](./6b43ebe569b186312d5b91598a1a304ed90acf62.svg)
![{\displaystyle [\mathbf {R} _{p}]}](./4eadd6b11b1ed8aa589b22aaeb20eabf41ec8039.svg)


}](./3016082960532df19e186266e5bdea0c97037ef3.svg)
















 voor de Utah State University
voor de Utah State University